XYZ@XYZ-99
Curiosity about the entire universe.
|
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy
CVPR 2023
We tackle the problem of learning universal robotic dexterous grasping from a point cloud observation under a table-top setting.
|
|
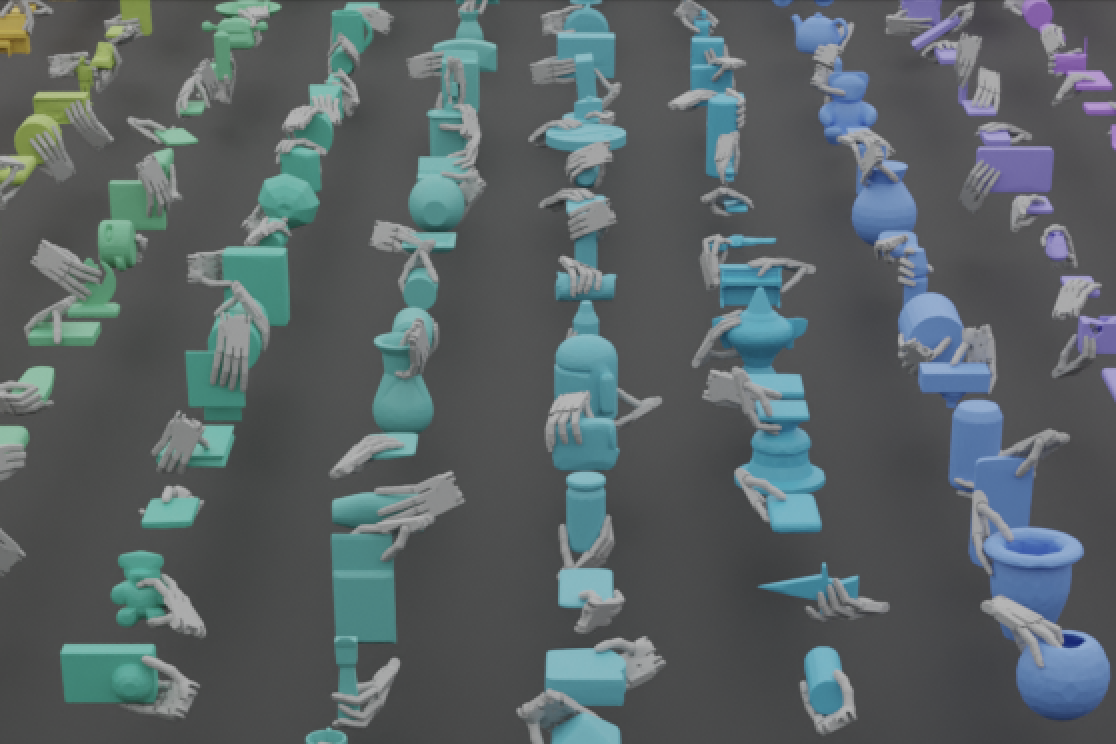
DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation
ICRA 2023
We present a large-scale robotic dexterous grasp dataset, DexGraspNet, generated by our proposed highly efficient synthesis method that can be generally applied to any dexterous hand.
|
|
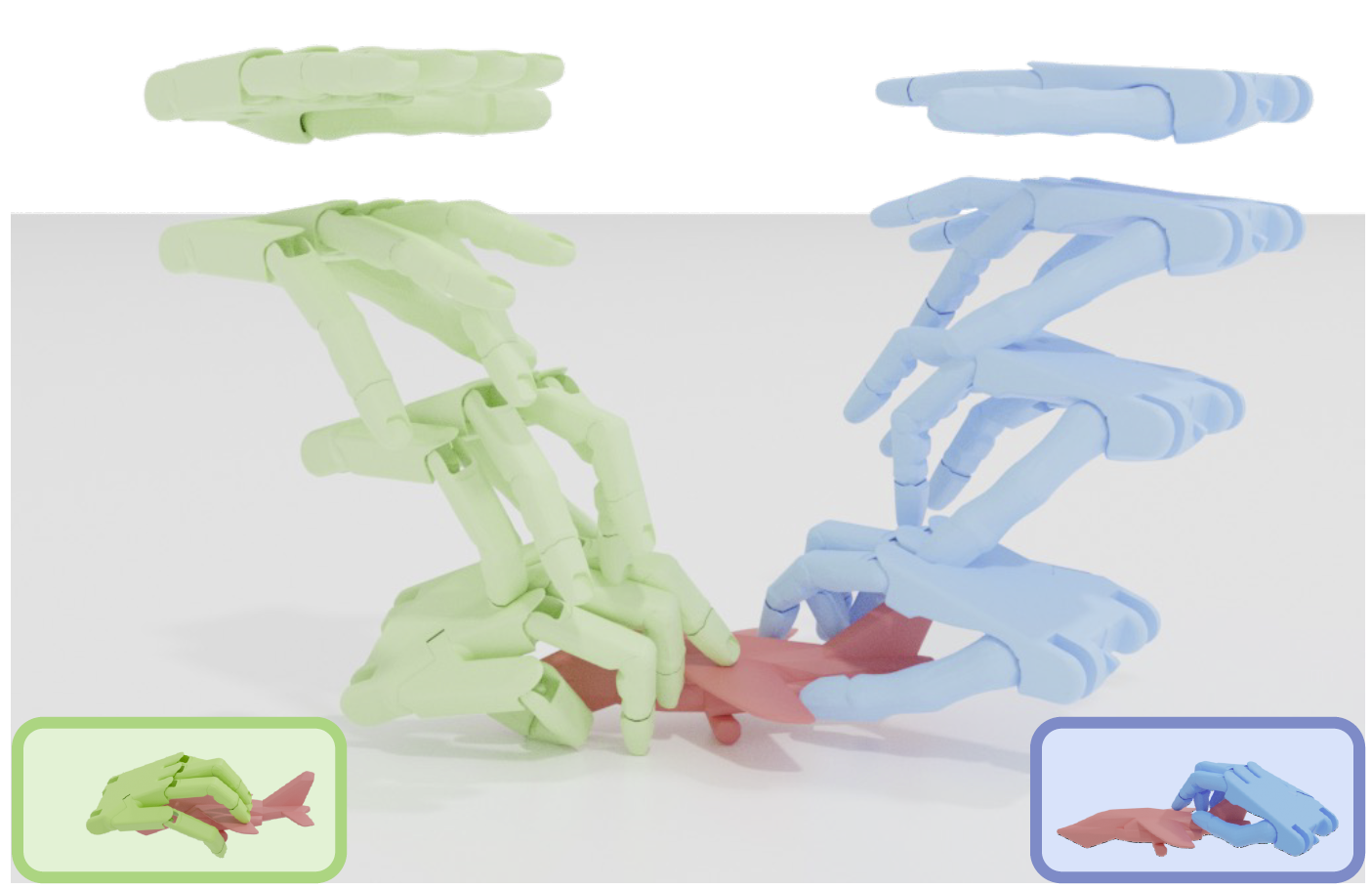
Tracking and Reconstructing Hand Object Interactions from Point Cloud Sequences in the Wild
AAAI 2023 (Oral Presentation)
In this work, we tackle the challenging task of jointly tracking hand object pose and reconstructing their shapes from depth point cloud sequences in the wild, given the initial poses at frame 0.
|