XYZ@XYZ-99
Curiosity about the entire universe.
|
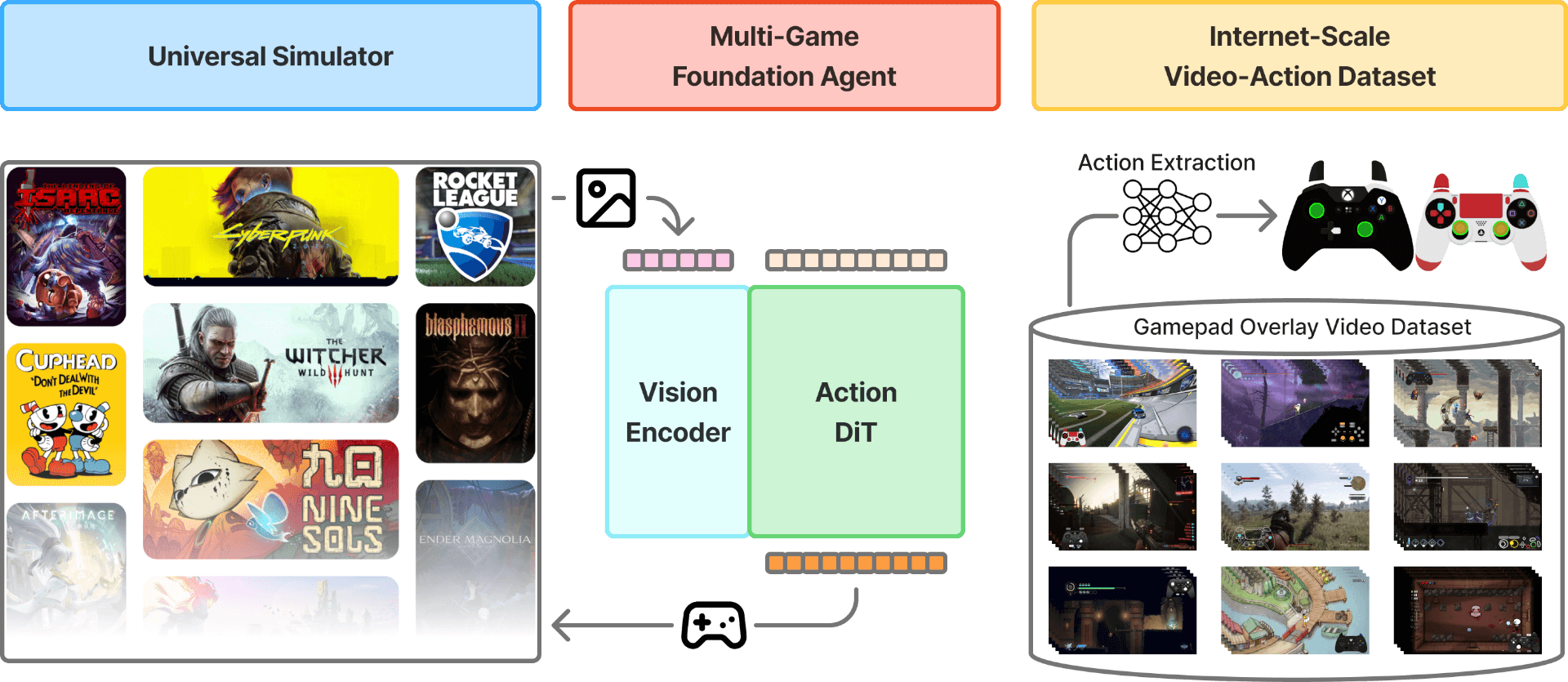
NitroGen: An Open Foundation Model for Generalist Gaming Agents
CVPR 2026 (Best Paper Honorable Mention)
An open vision-action foundation model for generalist gaming agents, trained via behavior cloning on 40,000+ hours of internet gameplay across 1,000+ games — generalizing to unseen games out of the box.
|
|
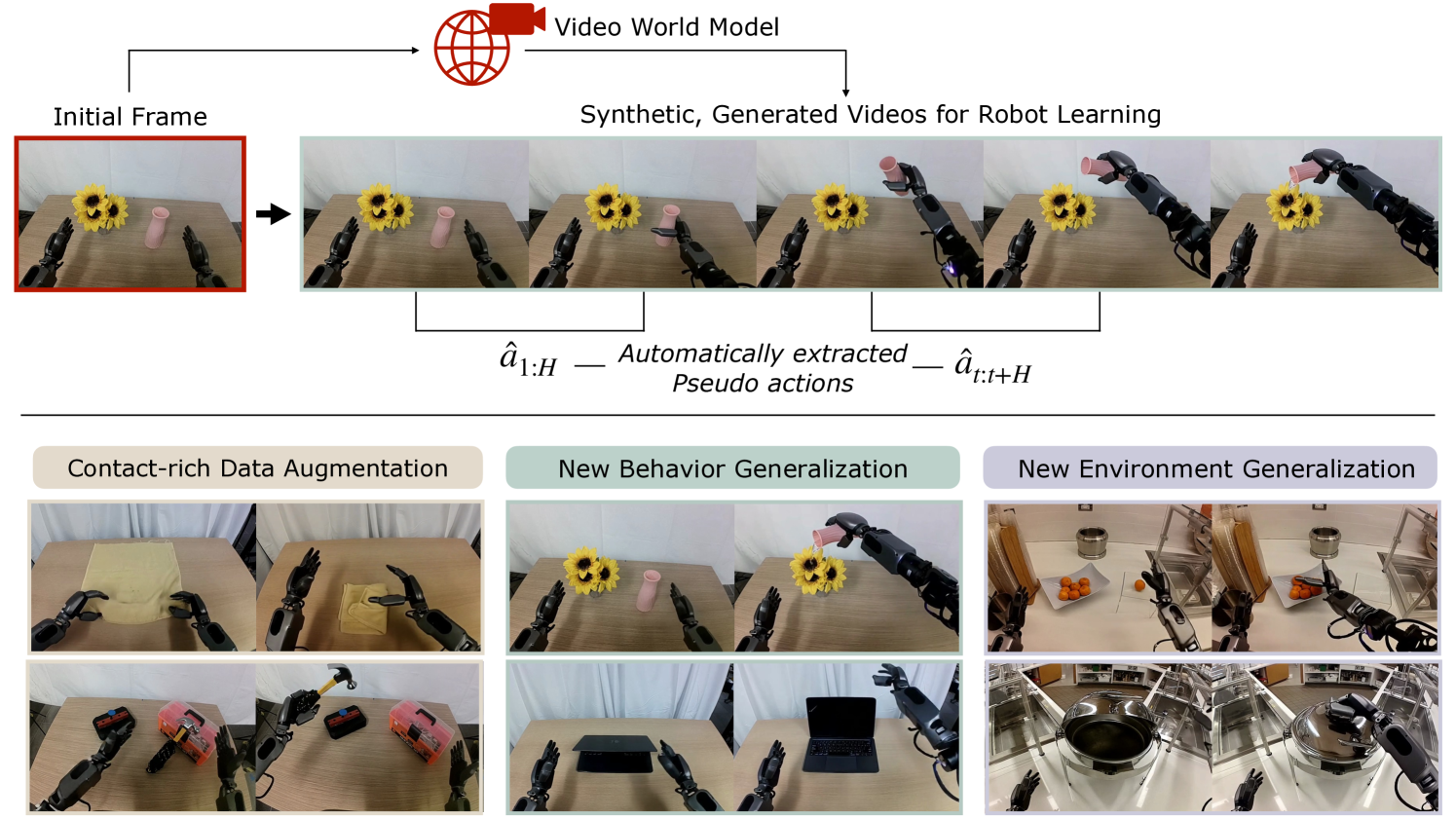
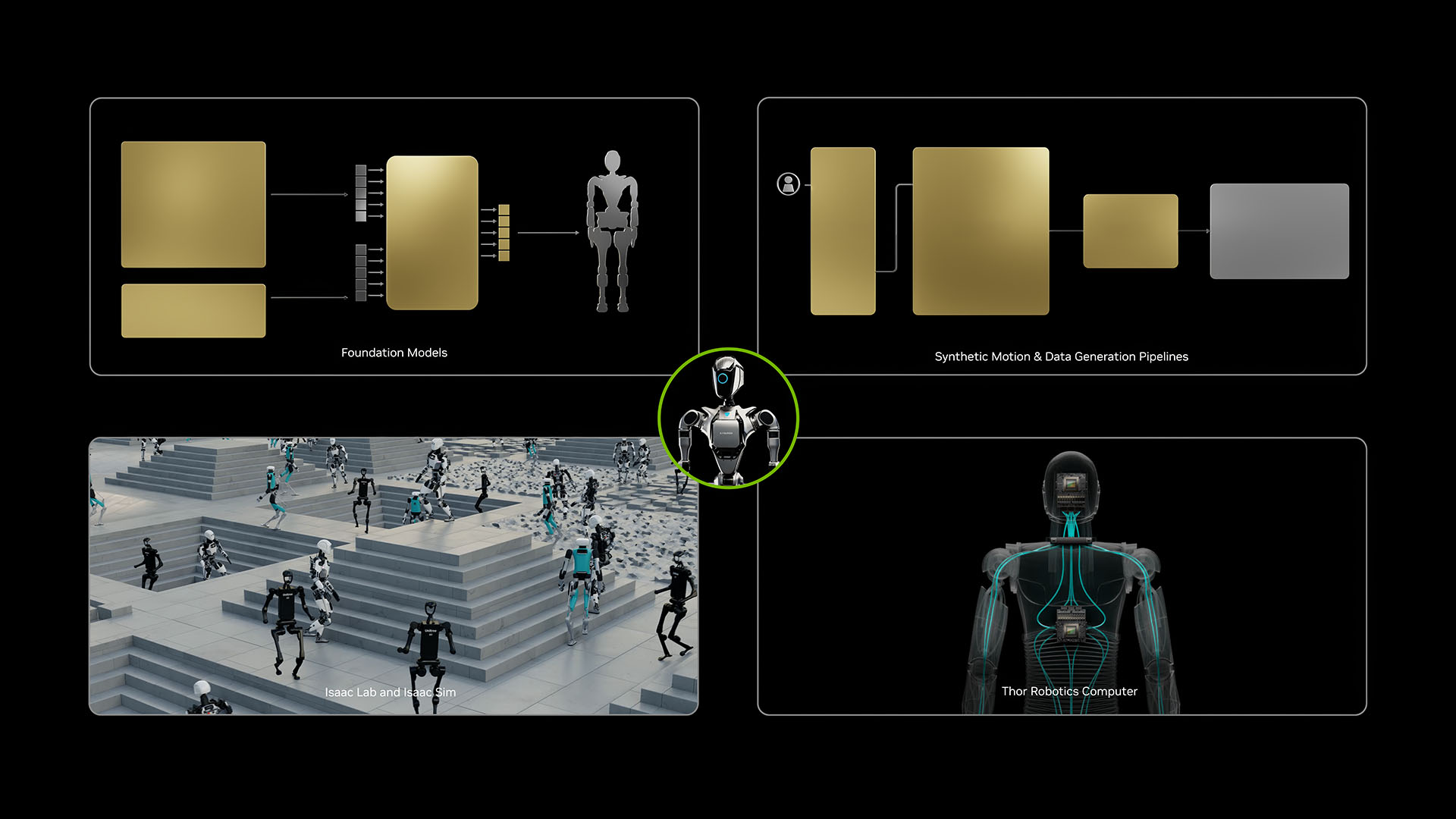
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Whitepaper 2025
An open, customizable Vision-Language-Action foundation model for generalist humanoid robots, trained on a heterogeneous mixture of real-robot trajectories, human videos, and synthetically generated data.
|
|
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy
CVPR 2023
We tackle the problem of learning universal robotic dexterous grasping from a point cloud observation under a table-top setting.
|
|
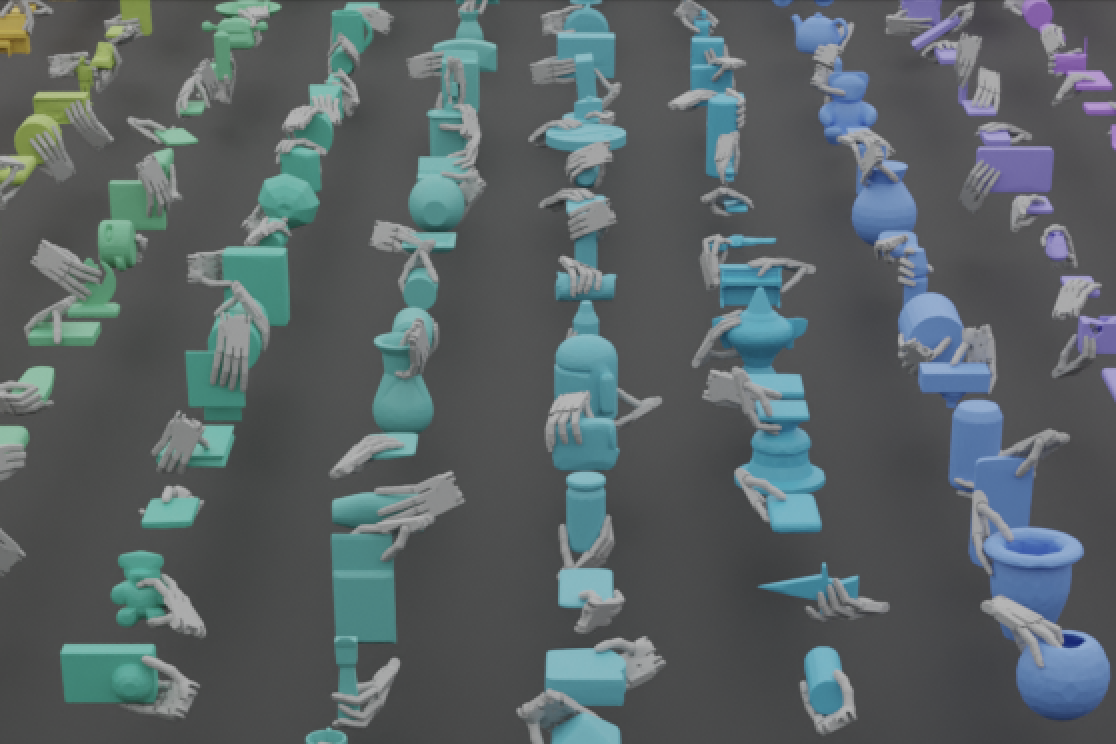
DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation
ICRA 2023
We present a large-scale robotic dexterous grasp dataset, DexGraspNet, generated by our proposed highly efficient synthesis method that can be generally applied to any dexterous hand.
|
|
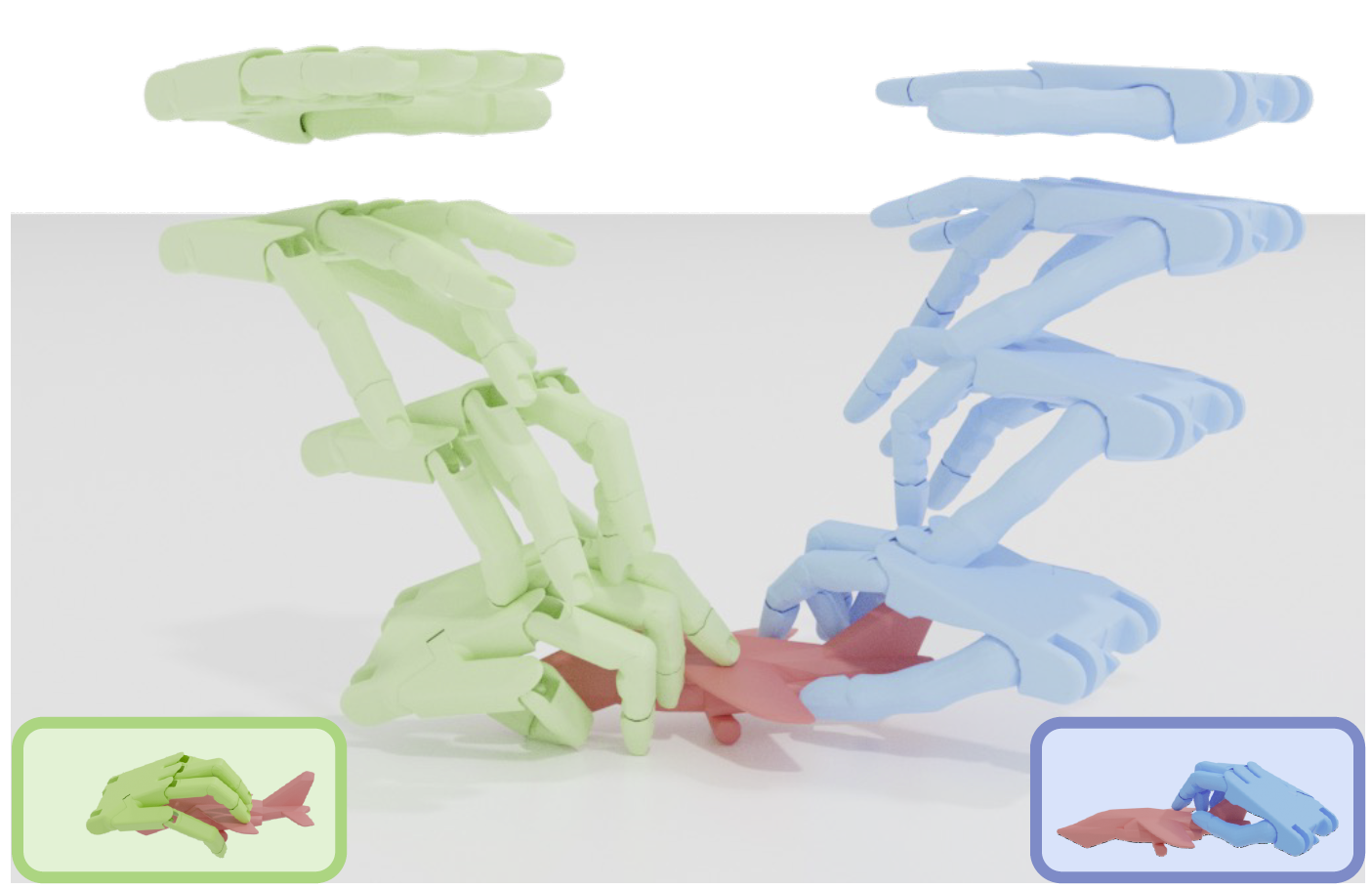
Tracking and Reconstructing Hand Object Interactions from Point Cloud Sequences in the Wild
AAAI 2023 (Oral Presentation)
In this work, we tackle the challenging task of jointly tracking hand object pose and reconstructing their shapes from depth point cloud sequences in the wild, given the initial poses at frame 0.
|
|
NVIDIA
|
Research Engineer
Jul 2024 – Present
Research engineer at GEAR, working with Dr. Jim Fan and Prof. Yuke Zhu on generalist foundation models for robotics and embodied agents.
|
|
NVIDIA
|
Research Intern
Oct 2023 – Dec 2023
Research intern with Dr. Jim Fan at the Embodied Agents Group.
|
|
BIGAI
Beijing, China
|
Research Intern
Aug 2021 – Aug 2022
Research intern at the Beijing Institute for General Artificial Intelligence, working on robotics and dexterous grasping with Prof. He Wang.
|
|
Peking University
Beijing, China
|
Research Intern
Jun 2020 – Feb 2021
Worked on 3D vision and scene reconstruction.
|
|
UC San Diego
La Jolla, CA
|
M.S. in Computer Science
Sep 2022 – Mar 2024
|
|
Peking University
Beijing, China
|
B.S. in Computer Science
Sep 2018 – Jul 2022
|